Kinematik
Maddi bir noktanın kinematiği
Hareketinin verilen denklemlerine göre bir noktanın hız ve ivmesinin belirlenmesi
Verilen: Bir noktanın hareket denklemleri: x = 12 günah(πt/6), santimetre; y= 6 cos 2 (πt/6), santimetre.
Yörüngesinin türünü ve zaman anını ayarlayın t = 1 sn Bir noktanın yörünge üzerindeki konumunu, hızını, tam, teğetsel ve normal ivmelerini ve ayrıca yörüngenin eğrilik yarıçapını bulun.
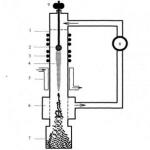
Katı bir cismin öteleme ve dönme hareketi

Verilen:
t = 2 sn; r 1 = 2 cm, R 1 = 4 cm; r2 = 6 cm, R2 = 8 cm; r 3 \u003d 12 cm, R3 \u003d 16 cm; s 5 \u003d t 3 - 6t (cm).
t = 2 anında A, C noktalarının hızlarını belirleyin; tekerlek 3'ün açısal ivmesi; B noktası ivmesi ve raf ivmesi 4.
Düz bir mekanizmanın kinematik analizi

Verilen:
R 1 , R 2 , L, AB, ω 1 .
Bul: ω 2 .

Yassı mekanizma çubuklar 1, 2, 3, 4 ve kaydırıcı E'den oluşur. Çubuklar silindirik menteşeler vasıtasıyla bağlanır. D noktası AB çubuğunun ortasında bulunur.
Verilen: ω 1 , ε 1 .
Bul: V A , V B , V D ve V E hızları; açısal hızlar ω 2 , ω 3 ve ω 4 ; ivme a B ; AB bağlantısının ε AB açısal ivmesi; mekanizmanın 2 ve 3 numaralı bağlantılarının P 2 ve P 3 hızlarının anlık merkezlerinin konumları.
Bir noktanın mutlak hızını ve mutlak ivmesini belirleme

Dikdörtgen bir levha, φ = yasasına göre sabit bir eksen etrafında döner. 6 t 2 - 3 t 3. φ açısını okumanın pozitif yönü şekillerde bir yay oku ile gösterilmiştir. Dönme ekseni OO 1 plakanın düzleminde yer alır (plaka uzayda döner).
M noktası plaka boyunca BD düz çizgisi boyunca hareket eder. Göreceli hareketinin yasası verilmiştir, yani bağımlılık s = AM = 40(t - 2 t 3) - 40(s - santimetre, t - saniye). mesafe b = 20 santimetre. Şekilde M noktası s = AM konumunda gösterilmiştir. > 0 (s için< 0 M noktası A noktasının diğer tarafındadır).
M noktasının t anında mutlak hızını ve mutlak ivmesini bulun 1 = 1 sn.
dinamikler
Değişken kuvvetlerin etkisi altında bir malzeme noktasının diferansiyel hareket denklemlerinin entegrasyonu
A noktasında bir V 0 başlangıç hızı almış olan m kütleli bir D yükü, dikey bir düzlemde yer alan eğri bir ABC borusunda hareket etmektedir. Uzunluğu l olan AB bölümünde, yük sabit bir T kuvvetinden (yönü şekilde gösterilmiştir) ve ortamın direncinin R kuvvetinden (bu kuvvetin modülü R = μV'dir) etkilenir. 2'de, R vektörü, yükün V hızına zıt yöndedir).
AB kesitinde borunun B noktasında hareketini tamamlayan yük, hız modülünün değerini değiştirmeden BC kesitine geçer. BC kesitinde, yüke değişken bir F kuvveti etki eder, bunun x ekseni üzerindeki izdüşümü F x verilir.
Yükü maddesel bir nokta olarak kabul ederek, BC kesitindeki hareket yasasını bulunuz, yani. x = f(t), burada x = BD. Boru üzerindeki yükün sürtünmesini ihmal ediniz.

Çözümü indirin
Mekanik bir sistemin kinetik enerjisindeki değişime ilişkin teorem
Mekanik sistem ağırlık 1 ve 2'den, silindirik bir makaradan 3, iki kademeli kasnaklardan 4 ve 5'ten oluşur. iplik bölümleri karşılık gelen düzlemlere paraleldir. Silindir (katı homojen silindir) referans düzlemi boyunca kaymadan yuvarlanır. 4 ve 5 kasnaklarının basamaklarının yarıçapları sırasıyla R 4 = 0,3 m, r 4 = 0,1 m, R 5 = 0,2 m, r 5 = 0,1 m'dir Her bir kasnağın kütlesi, dış kenarı boyunca eşit olarak dağılmış olarak kabul edilir. . 1 ve 2 ağırlıklarının destek düzlemleri kabadır, her ağırlık için kayma sürtünme katsayısı f = 0.1'dir.
Modülü F = F(s) yasasına göre değişen F kuvvetinin etkisi altında, burada s, uygulama noktasının yer değiştirmesidir, sistem bir dinlenme durumundan hareket etmeye başlar. Sistem hareket ettiğinde, dönme eksenine göre momenti sabit ve M5'e eşit olan kasnak 5 üzerine direnç kuvvetleri etki eder.
F kuvvetinin uygulandığı noktadaki s yer değiştirmesinin s 1 = 1,2 m'ye eşit olduğu andaki kasnağın açısal hızının değerini belirleyin. 
Çözümü indirin
Genel dinamik denkleminin mekanik bir sistemin hareketinin incelenmesine uygulanması
Mekanik bir sistem için doğrusal ivmeyi a 1 belirleyin. Bloklar ve silindirler için kütlelerin dış yarıçap boyunca dağıldığını düşünün. Kablolar ve kayışlar ağırlıksız ve uzamaz olarak kabul edilir; kayma yoktur. Yuvarlanma ve kayma sürtünmesini göz ardı edin. 
Çözümü indirin
Dönen bir cismin desteklerinin tepkilerinin belirlenmesine d'Alembert ilkesinin uygulanması
ω = 10 s -1 açısal hızıyla düzgün bir şekilde dönen dikey mil AK, A noktasında bir baskı yatağı ve D noktasında bir silindirik yatak ile sabitlenmiştir.
l 1 = 0,3 m uzunluğunda ağırlıksız bir çubuk 1, serbest ucunda m 1 = 4 kg kütle yükü ve l 2 = uzunluğunda homojen bir çubuk 2 olan mile rijit bir şekilde bağlanmıştır. 0,6 m, kütlesi m 2 = 8 kg. Her iki çubuk da aynı dikey düzlemde bulunur. Çubukların mile bağlanma noktaları ile α ve β açıları tabloda belirtilmiştir. Boyutlar AB=BD=DE=EK=b, burada b = 0,4 m Yükü malzeme noktası olarak alın.
Milin kütlesini ihmal ederek, baskı yatağı ve yatağın tepkilerini belirleyin.

Nokta kinematiği.
1. Teorik mekaniğin konusu. Temel soyutlamalar.
teorik mekanikmekanik hareketin genel yasalarının ve maddi cisimlerin mekanik etkileşiminin incelendiği bir bilimdir.
mekanik hareketBir cismin başka bir cisme göre uzayda ve zamanda meydana gelen hareketine denir.
mekanik etkileşim mekanik hareketlerinin doğasını değiştiren maddi cisimlerin böyle bir etkileşimi olarak adlandırılır.
Statik - Bu, kuvvet sistemlerini eşdeğer sistemlere dönüştürme yöntemlerini inceleyen ve katı bir cisme uygulanan kuvvetlerin dengesi için koşulları belirleyen teorik mekaniğin bir dalıdır.
Kinematik - ile ilgilenen teorik mekaniğin dalıdır. üzerlerine etki eden kuvvetlerden bağımsız olarak, malzeme cisimlerinin uzayda geometrik bir bakış açısıyla hareketi.
dinamikler - Bu, üzerlerine etki eden kuvvetlere bağlı olarak, uzaydaki maddi cisimlerin hareketini inceleyen bir mekanik dalıdır.
Teorik mekanikte çalışma nesneleri:
maddi nokta,
malzeme noktaları sistemi,
Kesinlikle sert gövde.
Mutlak uzay ve mutlak zaman birbirinden bağımsızdır. mutlak uzay - üç boyutlu, homojen, hareketsiz Öklid uzayı. mutlak zaman - Geçmişten geleceğe sürekli akar, homojendir, uzayın her noktasında aynıdır ve maddenin hareketine bağlı değildir.
2. Kinematik konusu.
Kinematik - bu, ataletlerini (yani kütlelerini) ve onlara etki eden kuvvetleri hesaba katmadan cisimlerin hareketinin geometrik özelliklerini inceleyen bir mekaniğin dalıdır.
Hareket eden bir cismin (veya noktanın) bu cismin hareketinin incelendiği cisme göre konumunu belirlemek için, katı bir şekilde, vücut ile birlikte oluşturan bazı koordinat sistemleri bağlanır. referans sistemi.
Kinematiğin ana görevi belirli bir cismin (nokta) hareket yasasını bilerek, hareketini karakterize eden tüm kinematik nicelikleri (hız ve ivme) belirlemektir.
3. Bir noktanın hareketini belirleme yöntemleri
· doğal yol
Bilinmelidir:
Nokta hareketi yörüngesi;
Saymanın başlangıcı ve yönü;
Belirli bir yörünge boyunca bir noktanın hareket yasası (1.1) şeklindedir.
· koordinat yöntemi
Denklemler (1.2), M noktasının hareket denklemleridir.
M noktasının yörüngesi için denklem, zaman parametresini ortadan kaldırarak elde edilebilir. « t » denklemlerden (1.2)
· vektör yolu
|
|
(1.3) Bir noktanın hareketini belirtmek için koordinat ve vektör yöntemleri arasındaki ilişki
|

Bir noktanın hareketini belirlemenin koordinat ve doğal yolları arasındaki bağlantı
Denklemlerden (1.2) zamanı hariç tutarak noktanın yörüngesini belirleyin;
-- bir yörünge boyunca bir noktanın hareket yasasını bulun (yay diferansiyeli için ifadeyi kullanın)
Entegrasyondan sonra, belirli bir yörünge boyunca bir noktanın hareket yasasını elde ederiz:
Bir noktanın hareketini belirtmek için koordinat ve vektör yöntemleri arasındaki bağlantı denklem (1.4) ile belirlenir.
4. Bir noktanın hızının vektör yöntemi ile belirlenmesi, hareketin belirtilmesi.
Şu anda izin vertnoktanın konumu yarıçap vektörü tarafından belirlenir ve zaman anındat 1
– yarıçap-vektör , daha sonra bir süre için ![]() nokta hareket edecektir.
nokta hareket edecektir.
|
|
nokta ortalama hız, vektörün yönü vektörle aynıdır
|

 (1.5)
(1.5)
Belirli bir zamanda bir noktanın hızı
Belirli bir anda bir noktanın hızını elde etmek için sınıra bir geçiş yapmak gerekir.
 (1.6)
(1.6)
(1.7)
Belirli bir zamanda bir noktanın hız vektörü yarıçap vektörünün zamana göre birinci türevine eşittir ve belirli bir noktada yörüngeye teğet olarak yönlendirilir.
(birim¾ m/s, km/s)
ortalama ivme vektörü vektörle aynı yöne sahipΔ v , yani yörüngenin içbükeyliğine yöneliktir.
Belirli bir zamanda bir noktanın ivme vektörü hız vektörünün birinci türevine veya noktanın yarıçap vektörünün zamana göre ikinci türevine eşittir.
(birim - )
Vektör, noktanın yörüngesine göre nasıl bulunur?
Doğrusal harekette vektör, noktanın hareket ettiği düz çizgi boyunca yönlendirilir. Noktanın yörüngesi düz bir eğri ise, o zaman ivme vektörü ve cp vektörü bu eğrinin düzleminde yer alır ve onun içbükeyliğine doğru yönlendirilir. Yörünge bir düzlem eğrisi değilse, cp vektörü yörüngenin içbükeyliğine doğru yönlendirilecek ve şu noktada yörüngeye teğet geçen düzlemde uzanacaktır.M ve bitişik bir noktada teğete paralel bir çizgi1 . AT nokta olduğunda sınır1 eğilimi M bu düzlem, sözde bitişik düzlemin konumunu işgal eder. Bu nedenle, genel durumda, ivme vektörü bitişik bir düzlemde yer alır ve eğrinin içbükeyliğine doğru yönlendirilir.
20. baskı. - E.: 2010.- 416 s.
Kitap, teknik üniversitelerin programlarına karşılık gelen bir ciltte maddi bir noktanın mekaniğinin, maddi noktalar sisteminin ve katı bir gövdenin temellerini özetlemektedir. Çözümlerine uygun yönergeler eşlik eden birçok örnek ve görev verilmiştir. Tam zamanlı ve yazışma teknik üniversitelerinin öğrencileri için.
Biçim: pdf
Boyut: 14 MB
İzleyin, indirin: drive.google
İÇİNDEKİLER
On üçüncü baskıya önsöz 3
Giriş 5
BİRİNCİ BÖLÜM KATI HAL İSTATİSTİKLERİ
Bölüm I. Temel kavramlar 9. Maddelerin ilk hükümleri
41. Kesinlikle rijit gövde; kuvvet. Statik görevleri 9
12. Statiğin ilk hükümleri » 11
$ 3. Bağlantılar ve tepkileri 15
Bölüm II. Kuvvetlerin bileşimi. Yakınsak kuvvetler sistemi 18
§dört. Geometrik olarak! Kuvvetleri birleştirme yöntemi. Yakınsak kuvvetlerin sonucu, kuvvetlerin ayrışması 18
f 5. Eksen ve düzlem üzerindeki kuvvet projeksiyonları, Kuvvetlerin ayarlanması ve eklenmesi için analitik yöntem 20
16. Yakınsak kuvvetler sisteminin dengesi_. . . 23
17. Statik problemlerinin çözümü. 25
Bölüm III. Merkeze göre kuvvet momenti. güç çifti 31
i 8. Merkez (veya nokta) etrafındaki kuvvet momenti 31
| 9. Birkaç kuvvet. çift anı 33
f10*. Denklik ve çift toplama teoremleri 35
Bölüm IV. Kuvvetler sistemini merkeze getirmek. Denge koşulları... 37
f 11. Paralel kuvvet transferi teoremi 37
112. Kuvvetler sistemini belirli bir merkeze getirmek - . .38
§ 13. Bir kuvvetler sisteminin denge koşulları. Sonuç 40'ın anındaki teorem
Bölüm V. Düz kuvvetler sistemi 41
§ 14. Cebirsel kuvvet momentleri ve çiftler 41
115. Düz bir kuvvetler sisteminin en basit forma indirgenmesi .... 44
§ 16. Düz bir kuvvetler sisteminin dengesi. Paralel kuvvetler durumu. 46
§ 17. Problem çözme 48
118. Vücut sistemlerinin dengesi 63
§ 19*. Statik olarak belirlenmiş ve statik olarak belirsiz vücut sistemleri (yapılar) 56"
f20*. İç kuvvetlerin tanımı. 57
§ 21*. Dağıtılmış Kuvvetler 58
E22*. Düz makasların hesaplanması 61
Bölüm VI. Sürtünme 64
! 23. Kayma sürtünmesi yasaları 64
: 24. Kaba bağ reaksiyonları. Sürtünme açısı 66
: 25. Sürtünme varlığında denge 66
(26*. Silindirik bir yüzeyde diş sürtünmesi 69
1 27*. Yuvarlanma sürtünmesi 71
Bölüm VII. Mekânsal kuvvetler sistemi 72
§28. Eksene göre kuvvet momenti. Ana vektör hesaplaması
ve kuvvetler sisteminin ana momenti 72
§ 29*. Mekansal kuvvetler sisteminin en basit forma indirgenmesi 77
§otuz. Keyfi bir uzaysal kuvvetler sisteminin dengesi. Paralel kuvvetler durumu
Bölüm VIII. Ağırlık merkezi 86
§31. Paralel Kuvvetler Merkezi 86
§ 32. Kuvvet alanı. Sert bir cismin ağırlık merkezi 88
§ 33. Homojen cisimlerin ağırlık merkezlerinin koordinatları 89
§ 34. Cisimlerin ağırlık merkezlerinin koordinatlarını belirleme yöntemleri. 90
§ 35. Bazı homojen cisimlerin ağırlık merkezleri 93
İKİNCİ BÖLÜM NOKTA VE RİJİT CİSİM KİNEMATİKLERİ
Bölüm IX. Nokta kinematiği 95
§ 36. Kinematiğe giriş 95
§ 37. Bir noktanın hareketini belirleme yöntemleri. . 96
§38. Nokta hız vektörü,. 99
§ 39
§40. Hareket belirleme koordinat yöntemi ile bir noktanın hız ve ivmesini belirleme 102
§41. Nokta kinematiğinin problemlerini çözme 103
§ 42. Doğal bir trihedronun eksenleri. Sayısal hız değeri 107
§ 43. Bir noktanın teğet ve normal ivmesi 108
§44. Yazılımdaki bir noktanın bazı özel hareket durumları
§45. 112 noktasının hareket, hız ve ivme grafikleri
§ 46. Problem çözme< 114
§47*. Kutupsal koordinatlarda bir noktanın hızı ve ivmesi 116
Bölüm X. Katı bir cismin öteleme ve dönme hareketleri. . 117
§48. öteleme hareketi 117
§ 49. Sert bir cismin bir eksen etrafında dönme hareketi. Açısal Hız ve Açısal İvme 119
§elli. Düzgün ve düzgün dönüş 121
§51. Dönen bir cismin noktalarının hızları ve ivmeleri 122
Bölüm XI. Katı bir cismin düzlem-paralel hareketi 127
§52. Düzlem-paralel hareket denklemleri (düzlem şeklinin hareketi). Hareketin öteleme ve dönmeye ayrışımı 127
§53*. Bir uçağın noktalarının yörüngelerinin belirlenmesi şekil 129
§54. Bir düzlemde noktaların hızlarının belirlenmesi şekil 130
§ 55. Vücudun iki noktasının hızlarının izdüşümlerine ilişkin teorem 131
§ 56. Anlık hız merkezini kullanarak bir düzlem şeklinin noktalarının hızlarının belirlenmesi. Merkez kavramı 132
§57. Problem çözme 136
§58*. Bir düzlemin noktalarının ivmelerinin belirlenmesi şekil 140
§59*. Anlık hızlanma merkezi "*"*
Bölüm XII*. Sabit bir nokta etrafında katı bir cismin hareketi ve serbest bir rijit cismin hareketi 147
§ 60. Bir sabit noktası olan katı bir cismin hareketi. 147
§61. Kinematik Euler denklemleri 149
§62. Vücut noktalarının hızları ve ivmeleri 150
§ 63. Serbest bir katı cismin genel hareketi 153
Bölüm XIII. Karmaşık nokta hareketi 155
§ 64. Göreceli, mecazi ve mutlak hareketler 155
§ 65, Hız toplama teoremi » 156
§66. İvmelerin toplanmasına ilişkin teorem (Coriols teoremi) 160
§67. Problem çözme 16*
Bölüm XIV*. Katı bir cismin karmaşık hareketi 169
§68. öteleme hareketlerinin eklenmesi 169
§69. İki paralel eksen etrafındaki dönüşlerin eklenmesi 169
§70. Silindirik dişliler 172
§ 71. Kesişen eksenler etrafında dönüşlerin eklenmesi 174
§72. Öteleme ve dönme hareketlerinin eklenmesi. Vida hareketi 176
ÜÇÜNCÜ BÖLÜM NOKTA DİNAMİĞİ
Bölüm XV: Dinamiğe giriş. dinamik yasaları 180
§ 73. Temel kavramlar ve tanımlar 180
§ 74. Dinamik yasaları. Maddi bir noktanın dinamiklerinin sorunları 181
§ 75. Birim sistemleri 183
§76. Temel kuvvet türleri 184
Bölüm XVI. Bir noktanın hareketinin diferansiyel denklemleri. Nokta dinamiği problemlerini çözme 186
§ 77. Diferansiyel denklemler, 6 numaralı malzeme noktasının hareketleri
§ 78. İlk dinamik probleminin çözümü (belirli bir hareketten kuvvetlerin belirlenmesi) 187
§ 79. Bir noktanın doğrusal hareketindeki ana dinamik sorununun çözümü 189
§ 80. Problem çözme örnekleri 191
§81*. Dirençli bir ortamda (havada) bir cismin düşmesi 196
§82. Bir noktanın eğrisel hareketi ile dinamiğin ana probleminin çözümü 197
Bölüm XVII. Nokta dinamiğinin genel teoremleri 201
§83. Noktanın hareket miktarı. Kuvvet Darbe 201
§ S4. 202 noktasının momentumundaki değişime ilişkin teorem
§ 85. Bir noktanın açısal momentumundaki değişime ilişkin teorem (momentler teoremi) "204
§86*. Merkezi bir kuvvetin etkisi altındaki hareket. Alanlar kanunu.. 266
§ 8-7. Zorla çalışma. Güç 208
§88. İş Hesaplama Örnekleri 210
§89. Bir noktanın kinetik enerjisindeki değişime ilişkin teorem. "... 213J
Bölüm XVIII. Bir noktanın serbest olmayan ve bağıl hareketi 219
§90. Bir noktanın serbest olmayan hareketi. 219
§91. Bir noktanın bağıl hareketi 223
§ 92. Dünyanın dönüşünün cisimlerin dengesi ve hareketi üzerindeki etkisi... 227
Bölüm 93*. Dünyanın dönüşü nedeniyle olay noktasının dikeyden sapması "230
Bölüm XIX. Bir noktanın doğrusal dalgalanmaları. . . 232
§ 94. Direnç kuvvetlerini hesaba katmadan serbest titreşimler 232
§ 95. Viskoz dirençli serbest salınımlar (sönümlü salınımlar) 238
§96. Zorlanmış titreşimler. rezonans 241
Bölüm XX*. Bir cismin yerçekimi alanındaki hareketi 250
§ 97. Dünya'nın yerçekimi alanında atılan bir cismin hareketi "250
§98. Dünyanın yapay uyduları. Eliptik yörüngeler. 254
§ 99. Ağırlıksızlık kavramı. "Yerel referans sistemleri 257
DÖRDÜNCÜ BÖLÜM BİR SİSTEMİN DİNAMİĞİ VE RİJİT BİR BEDEN
G ben ve bir XXI. Sistem dinamiğine giriş. eylemsizlik momentleri. 263
§ 100. Mekanik sistem. Dış ve iç kuvvetler 263
§ 101. Sistemin kütlesi. Ağırlık merkezi 264
§ 102. Bir cismin bir eksen etrafındaki eylemsizlik momenti. Eylemsizlik yarıçapı. . 265
103 $. Bir cismin paralel eksenlere göre eylemsizlik momentleri. Huygens teoremi 268
§ 104*. merkezkaç atalet momentleri. Vücudun ana eylemsizlik eksenleri ile ilgili kavramlar 269
105$*. Bir cismin keyfi bir eksen etrafındaki eylemsizlik momenti. 271
Bölüm XXII. Sistemin kütle merkezinin hareketi üzerine teorem 273
106 $. Sistem hareketinin diferansiyel denklemleri 273
§ 107. Kütle merkezinin hareketi üzerine teorem 274
108 $. Kütle merkezinin hareketinin korunumu yasası 276
§ 109. Problemleri çözme 277
Bölüm XXIII. Hareketli bir sistemin miktarındaki değişime ilişkin teorem. . 280
$ AMA. Hareket sistemi sayısı 280
§111. Momentum değişimi teoremi 281
§ 112. Momentumun korunumu yasası 282
113$*. Teoremin bir sıvının (gazın) hareketine uygulanması 284
§ 114*. Değişken kütleli gövde. Roket hareketi 287
Gdawa XXIV. Sistemin momentumundaki değişime ilişkin teorem 290
§ 115. Sistemin hareket miktarlarının ana momenti 290
116 $. Sistemin momentumunun ana momentinin değişimine ilişkin teorem (momentler teoremi) 292
117 dolar. Momentumun ana momentinin korunumu yasası. . 294
118 $. Problem çözme 295
119$*. Moment teoreminin sıvı (gaz) hareketine uygulanması 298
§ 120. Mekanik bir sistem için denge koşulları 300
Bölüm XXV. Sistemin kinetik enerjisindeki değişim ile ilgili teorem. . 301.
§ 121. Sistemin kinetik enerjisi 301
122 dolar. Bazı hesaplama çalışmaları 305
123 $. Sistemin kinetik enerjisindeki değişime ilişkin teorem 307
124 $. Problem çözme 310
125$*. Karma görevler "314
126 $. Potansiyel kuvvet alanı ve kuvvet fonksiyonu 317
127 $, Potansiyel Enerji. Mekanik enerjinin korunumu yasası 320
Bölüm XXVI. Genel Teoremlerin Katı Bir Cismin Dinamiğine Uygulanması 323
12$&. Sert bir cismin sabit bir eksen etrafında dönme hareketi ".323"
129 $. Fiziksel sarkaç. Atalet momentlerinin deneysel olarak belirlenmesi. 326
130 dolar. Katı bir cismin düzlem-paralel hareketi 328
131$*. Jiroskopun temel teorisi 334
132$*. Sabit bir nokta etrafında katı bir cismin hareketi ve serbest bir rijit cismin hareketi 340
Bölüm XXVII. d'Alembert ilkesi 344
133 dolar. d'Alembert'in bir nokta ve mekanik sistem ilkesi. . 344
134 $. Asal vektör ve asal atalet kuvvetleri 346
135 $. Problem çözme 348
136$*, Dönen bir cismin eksenine etki eden didemik reaksiyonlar. Dönen gövdelerin dengelenmesi 352
Bölüm XXVIII. Olası yer değiştirmeler ilkesi ve genel dinamik denklemi 357
§ 137. Bağlantıların sınıflandırılması 357
§ 138. Sistemin olası yer değiştirmeleri. Serbestlik derecesi sayısı. . 358
§ 139. Olası hareketler ilkesi 360
§ 140. Sorunları çözme 362
§ 141. Dinamik 367'nin genel denklemi
Bölüm XXIX. Genelleştirilmiş koordinatlarda sistemin denge koşulları ve hareket denklemleri 369
§ 142. Genelleştirilmiş koordinatlar ve genelleştirilmiş hızlar. . . 369
§ 143. Genelleştirilmiş kuvvetler 371
§ 144. Genelleştirilmiş koordinatlarda bir sistem için denge koşulları 375
§ 145. Lagrange denklemleri 376
§ 146. Sorunları çözme 379
Bölüm XXX*. Sistemin kararlı denge konumu etrafındaki küçük salınımları 387
§ 147. Denge kararlılığı kavramı 387
§ 148. Bir serbestlik derecesine sahip bir sistemin küçük serbest titreşimleri 389
§ 149. Bir serbestlik derecesine sahip bir sistemin küçük sönümlü ve zorlanmış salınımları 392
§ 150. İki serbestlik derecesine sahip bir sistemin küçük özet salınımları 394
Bölüm XXXI. Temel Etki Teorisi 396
§ 151. Darbe teorisinin temel denklemi 396
§ 152. Etki teorisinin genel teoremleri 397
§ 153. Etki iyileştirme faktörü 399
§ 154. Vücudun sabit bir bariyer üzerindeki etkisi 400
§ 155. İki cismin doğrudan merkezi etkisi (topların etkisi) 401
§ 156. İki cismin esnek olmayan bir etkisi sırasında kinetik enerji kaybı. Carnot teoremi 403
§ 157*. Dönen bir gövdeye bir darbe. Etki Merkezi 405
dizin 409
Herhangi bir müfredatın parçası olarak, fizik çalışması mekanikle başlar. Teorik değil, uygulamalı ve hesaplamalı değil, eski güzel klasik mekanikten. Bu mekaniğe Newton mekaniği de denir. Efsaneye göre, bilim adamı bahçede yürüyordu, bir elmanın düştüğünü gördü ve onu evrensel yerçekimi yasasını keşfetmeye iten bu fenomendi. Tabii ki, yasa her zaman var olmuştur ve Newton ona yalnızca insanlar tarafından anlaşılabilir bir biçim vermiştir, ancak değeri paha biçilemez. Bu yazıda Newton mekaniğinin yasalarını mümkün olduğunca ayrıntılı olarak açıklamayacağız, ancak her zaman işinize yarayabilecek temel bilgileri, temel bilgileri, tanımları ve formülleri ana hatlarıyla belirteceğiz.
Mekanik, maddi cisimlerin hareketini ve aralarındaki etkileşimleri inceleyen bir bilim olan fiziğin bir dalıdır.
Kelimenin kendisi Yunanca kökenlidir ve "makine yapma sanatı" olarak tercüme edilir. Ancak makineler yapmadan önce, daha gidecek çok yolumuz var, bu yüzden atalarımızın ayak izlerini takip edelim ve ufka açılı olarak atılan taşların hareketini ve h yüksekliğinden kafalara düşen elmaları inceleyeceğiz.

Fizik eğitimi neden mekanikle başlar? Tamamen doğal olduğu için, termodinamik dengeden başlamamak mı?!
Mekanik en eski bilimlerden biridir ve tarihsel olarak fizik çalışmaları tam olarak mekaniğin temelleriyle başlamıştır. Zaman ve mekan çerçevesi içine yerleştirilen insanlar aslında ne kadar isteseler de başka bir şeyden yola çıkamazlardı. Hareket eden cisimler ilk dikkat ettiğimiz şeydir.
Hareket nedir?
Mekanik hareket, cisimlerin uzaydaki konumlarının zaman içinde birbirlerine göre değişmesidir.
Bu tanımdan sonra oldukça doğal olarak bir referans çerçevesi kavramına geliyoruz. Vücutların uzaydaki konumlarını birbirine göre değiştirme. Buradaki anahtar kelimeler: birbirine göre . Sonuçta, bir arabadaki yolcu, yolun kenarında duran bir kişiye göre belirli bir hızda hareket eder ve yakındaki bir koltukta komşusuna göre dinlenir ve bir arabadaki bir yolcuya göre başka bir hızda hareket eder. onları aşar.

Bu nedenle, hareketli nesnelerin parametrelerini normal olarak ölçmek ve kafa karıştırmamak için ihtiyacımız var. referans sistemi - sıkı bir şekilde birbirine bağlı referans gövdesi, koordinat sistemi ve saat. Örneğin, dünya güneş merkezli bir referans çerçevesinde güneşin etrafında hareket eder. Günlük yaşamda, neredeyse tüm ölçümlerimizi Dünya ile ilişkili bir jeosentrik referans sisteminde gerçekleştiriyoruz. Dünya, arabaların, uçakların, insanların, hayvanların hareket ettiği göreceli bir referans vücuttur.

Bir bilim olarak mekaniğin kendi görevi vardır. Mekaniğin görevi, herhangi bir zamanda vücudun uzaydaki konumunu bilmektir. Başka bir deyişle, mekanik, hareketin matematiksel bir tanımını oluşturur ve onu karakterize eden fiziksel nicelikler arasındaki bağlantıları bulur.
Daha ileri gitmek için, “kavramına ihtiyacımız var. maddi nokta ". Fiziğin kesin bir bilim olduğunu söylüyorlar, ancak fizikçiler bu kesinlik üzerinde anlaşmak için kaç tane tahmin ve varsayım yapılması gerektiğini biliyorlar. Hiç kimse maddi bir nokta görmedi veya ideal bir gazı koklamadı, ama bunlar var! Onlarla yaşamak çok daha kolay.
Maddi nokta, bu problem bağlamında boyutu ve şekli ihmal edilebilecek bir cisimdir.
Klasik mekaniğin bölümleri
Mekanik birkaç bölümden oluşur
- Kinematik
- dinamikler
- Statik
Kinematik fiziksel bir bakış açısından, vücudun nasıl hareket ettiğini tam olarak inceler. Başka bir deyişle, bu bölüm hareketin nicel özelliklerini ele almaktadır. Hızı, yolu bulun - kinematiğin tipik görevleri
dinamikler neden böyle hareket ettiği sorusunu çözer. Yani cisme etki eden kuvvetleri dikkate alır.
Statik kuvvetlerin etkisi altında cisimlerin dengesini inceler, yani şu soruyu cevaplar: neden hiç düşmüyor?
Klasik mekaniğin uygulanabilirlik sınırları
Klasik mekanik artık her şeyi açıklayan (geçen yüzyılın başında her şey tamamen farklıydı) ve net bir uygulama alanı olan bir bilim olduğunu iddia etmiyor. Genel olarak, klasik mekaniğin yasaları, boyut olarak bildiğimiz dünya (makrodünya) için geçerlidir. Klasik mekaniğin yerini kuantum mekaniği aldığında, parçacıklar dünyasında çalışmayı bırakırlar. Ayrıca klasik mekanik, cisimlerin hareketinin ışık hızına yakın bir hızda gerçekleştiği durumlarda geçerli değildir. Bu gibi durumlarda, göreceli etkiler belirgin hale gelir. Kabaca söylemek gerekirse, kuantum ve göreli mekanik - klasik mekanik çerçevesinde, bu, vücudun boyutlarının büyük ve hızın küçük olduğu özel bir durumdur.

Genel olarak konuşursak, kuantum ve relativistik etkiler asla kaybolmaz; ayrıca makroskopik cisimlerin olağan hareketi sırasında ışık hızından çok daha düşük bir hızda gerçekleşirler. Başka bir şey de, bu etkilerin etkisinin o kadar küçük olması ki, en doğru ölçümlerin ötesine geçmiyor. Klasik mekanik bu nedenle temel önemini asla kaybetmeyecektir.
Gelecek makalelerde mekaniğin fiziksel temellerini incelemeye devam edeceğiz. Mekaniği daha iyi anlamak için, her zaman başvurabilirsiniz. yazarlarımız, bireysel olarak en zor görevin karanlık noktasına ışık tutuyor.
Statik, kuvvetlerin etkisi altındaki malzeme cisimlerinin denge koşullarını ve ayrıca kuvvetleri eşdeğer sistemlere dönüştürme yöntemlerini inceleyen teorik mekaniğin bir bölümüdür.Denge durumu altında, statikte, mekanik sistemin tüm parçalarının bir eylemsiz koordinat sistemine göre hareketsiz olduğu durum anlaşılır. Statiğin temel nesnelerinden biri, uygulama noktaları ve kuvvetleridir.
Yarıçap vektörü olan bir malzeme noktasına diğer noktalardan etki eden kuvvet, diğer noktaların dikkate alınan nokta üzerindeki etkisinin bir ölçüsüdür ve bunun sonucunda atalet referans çerçevesine göre ivme alır. Değer kuvvet formülle belirlenir:
,
burada m noktanın kütlesidir - noktanın kendisinin özelliklerine bağlı bir değer. Bu formüle Newton'un ikinci yasası denir.
Statiğin dinamikte uygulanması
Kesinlikle katı bir cismin hareket denklemlerinin önemli bir özelliği, kuvvetlerin eşdeğer sistemlere dönüştürülebilmesidir. Böyle bir dönüşümle, hareket denklemleri formlarını korur, ancak cisme etki eden kuvvetler sistemi daha basit bir sisteme dönüştürülebilir. Böylece, kuvvetin uygulama noktası, etki çizgisi boyunca hareket ettirilebilir; kuvvetler paralelkenar kuralına göre genişletilebilir; bir noktada uygulanan kuvvetler geometrik toplamları ile değiştirilebilir.
Bu tür dönüşümlere bir örnek yerçekimidir. Sert bir cismin tüm noktalarına etki eder. Ancak, tüm noktalara dağıtılan yerçekimi kuvvetinin yerini, cismin kütle merkezine uygulanan tek bir vektör alırsa, cismin hareket yasası değişmeyecektir.
Cisme etki eden ana kuvvetler sistemine, kuvvetlerin yönlerinin tersine çevrildiği bir eşdeğer sistem eklersek, bu sistemlerin etkisi altındaki cisim dengede olacaktır. Böylece, eşdeğer kuvvet sistemlerini belirleme görevi, denge sorununa, yani statik sorununa indirgenir.
Statiğin ana görevi bir kuvvetler sisteminin eşdeğer sistemlere dönüştürülmesi için yasaların oluşturulmasıdır. Bu nedenle, statik yöntemler yalnızca dengedeki cisimlerin incelenmesinde değil, aynı zamanda katı bir cismin dinamiklerinde, kuvvetlerin daha basit eşdeğer sistemlere dönüştürülmesinde de kullanılır.
Malzeme noktası statiği
Dengede olan bir maddesel nokta düşünün. Üzerine n kuvvet etki etsin, k = 1, 2, ..., n.
Malzeme noktası dengedeyse, üzerine etki eden kuvvetlerin vektör toplamı sıfıra eşittir:
(1)
.
Dengede bir noktaya etki eden kuvvetlerin geometrik toplamı sıfırdır.
geometrik yorumlama. İkinci vektörün başlangıcı birinci vektörün sonuna, üçüncü vektörün başlangıcı ikinci vektörün sonuna yerleştirilir ve bu işleme devam edilirse, sonuncunun sonu, n'inci vektör olacaktır. ilk vektörün başlangıcı ile birleştirilmelidir. Yani, kenarlarının uzunlukları vektörlerin modüllerine eşit olan kapalı bir geometrik şekil elde ederiz. Tüm vektörler aynı düzlemdeyse, kapalı bir çokgen elde ederiz.
Seçmek genellikle uygundur dikdörtgen koordinat sistemi Oxyz. O zaman koordinat eksenlerindeki tüm kuvvet vektörlerinin izdüşümlerinin toplamı sıfıra eşittir:
Bir vektör tarafından tanımlanan herhangi bir yönü seçerseniz, bu yöndeki kuvvet vektörlerinin izdüşümlerinin toplamı sıfıra eşittir:
.
(1) denklemini vektörle skaler olarak çarparız:
.
İşte vektörlerin skaler çarpımı ve .
Bir vektörün vektör yönüne izdüşümü aşağıdaki formülle belirlenir:
.
Rijit gövde statiği
Bir nokta etrafında kuvvet momenti
Kuvvet momentinin belirlenmesi
kuvvet anı, sabit merkez O'ya göre A noktasındaki gövdeye uygulanan , vektörlerin vektör ürününe eşit bir vektör olarak adlandırılır ve:(2) .
geometrik yorumlama

Kuvvet momenti, F kuvveti ile OH kolunun çarpımına eşittir.
Vektörler ve şeklin düzleminde yer alsın. Çapraz ürünün özelliğine göre, vektör vektörlere diktir ve , yani şeklin düzlemine diktir. Yönü doğru vida kuralı ile belirlenir. Şekilde, moment vektörü bize doğru yönlendirilmiştir. Anın mutlak değeri:
.
Çünkü, o zaman
(3)
.
Geometriyi kullanarak, kuvvet momentinin başka bir yorumu yapılabilir. Bunu yapmak için, kuvvet vektörü boyunca düz bir AH çizgisi çizin. O merkezinden OH dikini bu çizgiye bırakıyoruz. Bu dikmenin uzunluğuna denir. güçlü omuz. O zamanlar
(4)
.
Çünkü formül (3) ve (4) eşdeğerdir.
Böylece, kuvvet momentinin mutlak değeri O merkezine göre omuzdaki kuvvet ürünü seçilen merkeze göre bu kuvvet O .
Momenti hesaplarken, kuvveti iki bileşene ayırmak genellikle uygundur:
,
nerede . Kuvvet O noktasından geçer. Bu nedenle momentumu sıfırdır. O zamanlar
.
Anın mutlak değeri:
.
Dikdörtgen koordinatlarda moment bileşenleri
O noktasında ortalanmış bir dikdörtgen koordinat sistemi Oxyz seçersek, kuvvet momenti aşağıdaki bileşenlere sahip olacaktır:
(5.1)
;
(5.2)
;
(5.3)
.
Seçilen koordinat sisteminde A noktasının koordinatları şunlardır:
.
Bileşenler, sırasıyla eksenler etrafındaki kuvvet momentinin değerleridir.
Merkeze göre kuvvet momentinin özellikleri
Bu merkezden geçen kuvvetin O merkezi etrafındaki momenti sıfıra eşittir.
Kuvvetin uygulama noktası, kuvvet vektöründen geçen bir çizgi boyunca hareket ettirilirse, böyle bir hareket sırasında moment değişmez.
Vücudun bir noktasına uygulanan kuvvetlerin vektör toplamının momenti, aynı noktaya uygulanan kuvvetlerin her birinden gelen momentlerin vektör toplamına eşittir:
.
Aynısı, uzama çizgileri bir noktada kesişen kuvvetler için de geçerlidir.
Kuvvetlerin vektör toplamı sıfır ise:
,
o zaman bu kuvvetlerden gelen momentlerin toplamı, momentlerin hesaplandığı merkezin konumuna bağlı değildir:
.
güç çifti
güç çifti- bunlar, vücudun farklı noktalarına uygulanan, mutlak değerde eşit ve zıt yönlere sahip iki kuvvettir.
Bir çift kuvvet, yarattıkları an ile karakterize edilir. Çifte dahil olan kuvvetlerin vektör toplamı sıfır olduğundan, çiftin oluşturduğu moment, momentin hesaplandığı noktaya bağlı değildir. Statik denge açısından, çiftteki kuvvetlerin doğası önemsizdir. Belirli bir değere sahip bir kuvvet momentinin vücuda etki ettiğini belirtmek için bir çift kuvvet kullanılır.
Belirli bir eksen etrafındaki kuvvet momenti
Genellikle, seçilen bir nokta etrafındaki kuvvet momentinin tüm bileşenlerini bilmemize gerek olmadığı, ancak yalnızca seçilen bir eksen etrafındaki kuvvet momentini bilmemiz gereken durumlar vardır.
O noktasından geçen eksen etrafındaki kuvvet momenti, O noktası etrafındaki kuvvet momentinin vektörünün eksen yönüne izdüşümüdür.
Bir eksen etrafındaki kuvvet momentinin özellikleri
Bu eksenden geçen kuvvetin eksen etrafındaki momenti sıfıra eşittir.
Bu eksene paralel bir kuvvetin bir eksen etrafındaki momenti sıfırdır.
Bir eksen etrafındaki kuvvet momentinin hesaplanması

A noktasında cisme bir kuvvet etki etsin. Bu kuvvetin O'O' eksenine göre momentini bulalım.
Dikdörtgen bir koordinat sistemi oluşturalım. Oz ekseninin O'O'' ile çakışmasına izin verin. A noktasından OH dikini O'O'' ye bırakıyoruz. O ve A noktalarından Ox eksenini çiziyoruz. Oy eksenini Ox ve Oz'a dik çiziyoruz. Kuvveti, koordinat sisteminin eksenleri boyunca bileşenlere ayırırız:
.
Kuvvet O'O'' eksenini kesiyor. Bu nedenle momentumu sıfırdır. Kuvvet O'O'' eksenine paraleldir. Bu nedenle, momenti de sıfırdır. Formül (5.3) ile şunu buluruz:
.
Bileşenin, merkezi O noktası olan daireye teğetsel olarak yönlendirildiğine dikkat edin. Vektörün yönü sağ vida kuralı ile belirlenir.
Katı bir cisim için denge koşulları
Dengede, cisme etki eden tüm kuvvetlerin vektör toplamı sıfıra eşittir ve bu kuvvetlerin rastgele sabit bir merkeze göre momentlerinin vektör toplamı sıfıra eşittir:
(6.1)
;
(6.2)
.
Kuvvet momentlerinin hesaplandığı O merkezinin keyfi olarak seçilebileceğini vurguluyoruz. O noktası cisme ait olabilir veya onun dışında olabilir. Genellikle hesaplamaları kolaylaştırmak için O merkezi seçilir.
Denge koşulları başka bir şekilde formüle edilebilir.
Dengede, rastgele bir vektör tarafından verilen herhangi bir yöndeki kuvvetlerin izdüşümlerinin toplamı sıfıra eşittir:
.
Rasgele bir O'O'' ekseni etrafındaki kuvvetlerin momentlerinin toplamı da sıfıra eşittir:
.
Bazen bu koşullar daha uygundur. Eksenleri seçerek hesaplamaların daha basit hale getirildiği zamanlar vardır.
Vücudun ağırlık merkezi
En önemli kuvvetlerden birini düşünün - yerçekimi. Burada kuvvetler cismin belirli noktalarında uygulanmaz, hacmine sürekli olarak dağılır. Sonsuz küçük hacimli vücudun her bölümü için ∆V, yerçekimi kuvveti etki eder. Burada ρ, cismin maddesinin yoğunluğu, serbest düşüşün ivmesidir.
Vücudun sonsuz küçük bir bölümünün kütlesi olsun. Ve bu bölümün konumunu A k noktası tanımlasın. Denge denklemlerinde (6) yer alan yerçekimi kuvveti ile ilgili nicelikleri bulalım.
Vücudun tüm bölümleri tarafından oluşturulan yerçekimi kuvvetlerinin toplamını bulalım:
,
vücudun kütlesi nerede. Böylece, vücudun sonsuz küçük parçalarının yerçekimi kuvvetlerinin toplamı, tüm vücudun bir yerçekimi vektörü ile değiştirilebilir:
.
Seçilen O merkezine göre yerçekimi kuvvetlerinin momentlerinin toplamını keyfi bir şekilde bulalım:
.
Burada adlandırılan C noktasını tanıttık. ağırlık merkezi gövde. O noktasında ortalanmış bir koordinat sisteminde ağırlık merkezinin konumu aşağıdaki formülle belirlenir:
(7)
.
Böylece, statik denge belirlenirken, vücudun tek tek bölümlerinin yerçekimi kuvvetlerinin toplamı, sonuç ile değiştirilebilir.
,
konumu formül (7) ile belirlenen C gövdesinin kütle merkezine uygulanır.
Çeşitli geometrik şekiller için ağırlık merkezinin konumu ilgili referans kitaplarında bulunabilir. Vücudun bir ekseni veya simetri düzlemi varsa, ağırlık merkezi bu eksen veya düzlemde bulunur. Böylece, bir kürenin, dairenin veya dairenin ağırlık merkezleri, bu şekillerin dairelerinin merkezlerinde bulunur. Dikdörtgen paralel yüzlü, dikdörtgen veya karenin ağırlık merkezleri de merkezlerinde bulunur - köşegenlerin kesişme noktalarında.

Düzgün (A) ve doğrusal (B) dağıtılmış yük.
Kuvvetlerin vücudun belirli noktalarında uygulanmadığı, ancak yüzeyi veya hacmi üzerinde sürekli olarak dağıldığı yerçekimi kuvvetine benzer durumlar da vardır. Bu tür kuvvetlere denir dağıtılmış kuvvetler veya .
(Şekil A). Ayrıca, yerçekimi durumunda olduğu gibi, diyagramın ağırlık merkezine uygulanan bileşke büyüklük kuvveti ile değiştirilebilir. Şekil A'daki diyagram bir dikdörtgen olduğundan, diyagramın ağırlık merkezi, merkez - C noktasındadır: | AC| = | CB |. (resim B). Ayrıca sonuç ile değiştirilebilir. Sonucun değeri, diyagramın alanına eşittir:.
Uygulama noktası, diyagramın ağırlık merkezidir. Yüksekliği h olan bir üçgenin ağırlık merkezi tabandan uzaktadır. Bu yüzden .
sürtünme kuvvetleri
kayma sürtünmesi. Vücudun düz bir yüzeyde olmasına izin verin. Ve yüzeyin vücuda etki ettiği yüzeye dik bir kuvvet olsun (basınç kuvveti). Daha sonra kayan sürtünme kuvveti yüzeye paralel ve yana doğru yönlendirilerek cismin hareket etmesini engeller. En büyük değeri:
,
burada f sürtünme katsayısıdır. Sürtünme katsayısı boyutsuz bir niceliktir.
yuvarlanma sürtünmesi. Yuvarlatılmış gövdenin yuvarlanmasına izin verin veya yüzeyde yuvarlanabilir. Ve yüzeyin vücuda etki ettiği yüzeye dik olan basınç kuvveti olsun. Daha sonra vücut üzerinde, yüzeyle temas noktasında, vücudun hareketini engelleyen sürtünme kuvvetleri momenti etki eder. Sürtünme momentinin en büyük değeri:
,
burada δ yuvarlanma sürtünme katsayısıdır. Uzunluk boyutuna sahiptir.
Referanslar:
S. M. Targ, Teorik Mekanikte Kısa Kurs, Yüksek Okul, 2010.